Artificial finger able to identify surface material Tech with 90% accuracy
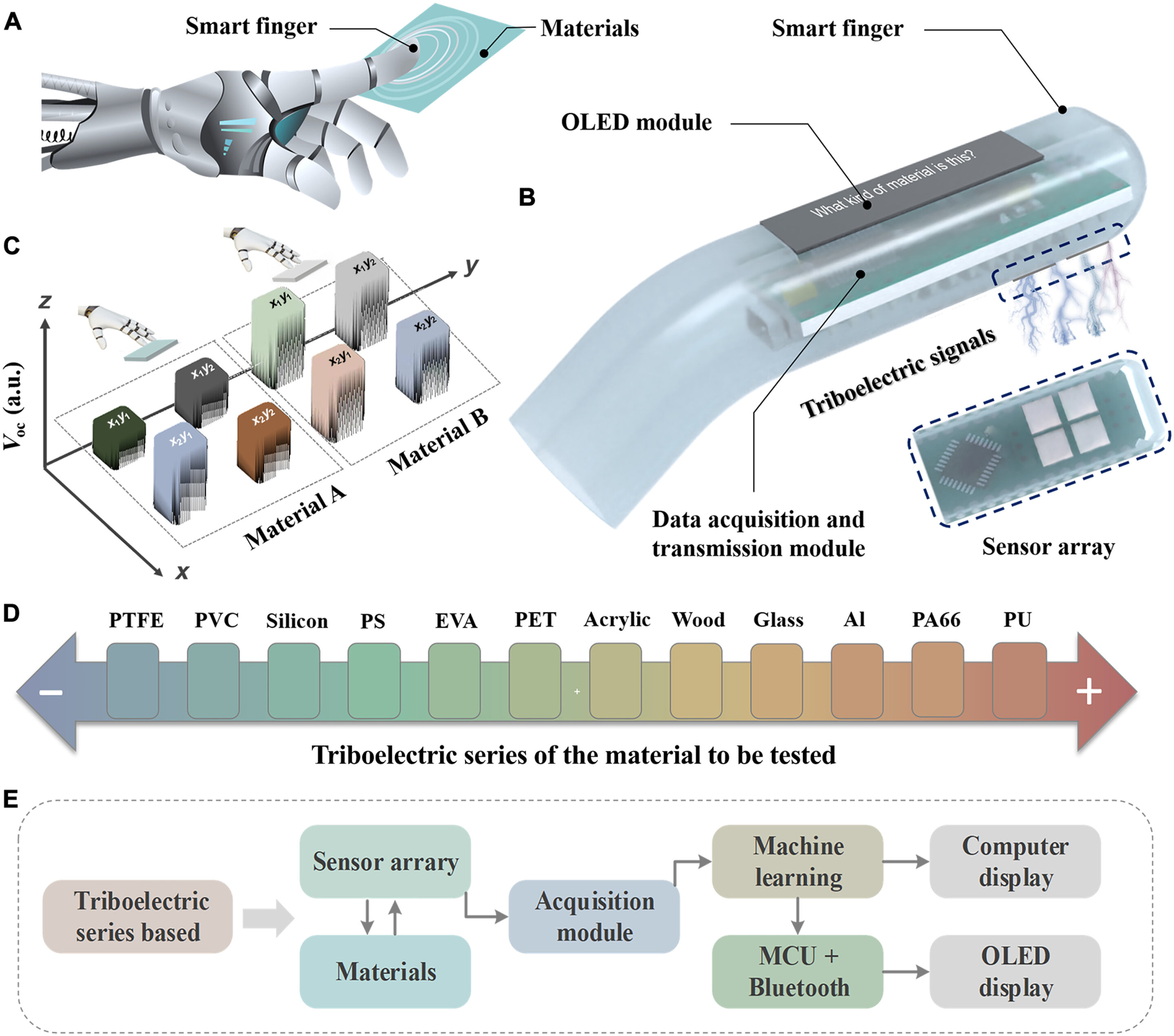
(A) Schematic diagram of the material identification process of the triboelectric tactile perception smart finger. (B) Structure of the triboelectric tactile perception smart finger, consisting of a triboelectric sensor array, data acquisition and transmission module, and display module. (C) Schematic diagram of the output signals of the triboelectric sensor array when the smart finger identifies different materials. a.u., arbitrary units. (D) Typical materials located in different positions in the triboelectric series: Electronegativity increases from right to left; conversely, electropositivity increases from left to right.
Category